|
Da Vinci Firmware 1
Firmware for the DaVinci-M rocket avionics board.
|
|
Da Vinci Firmware 1
Firmware for the DaVinci-M rocket avionics board.
|
Implementations of the main application threads (RTOS tasks). More...

Functions | |
| void | StartSensor_Task (void *argument) |
| Function implementing the Sensor_Task thread. | |
| void | StartFSM (void *argument) |
| Function implementing the FSM thread. | |
| void | StartKalman_mkf (void *argument) |
| Function implementing the Kalman_mkf thread. | |
| void | StartMPC_Task (void *argument) |
| Function implementing the MPC_Task thread. | |
Implementations of the main application threads (RTOS tasks).
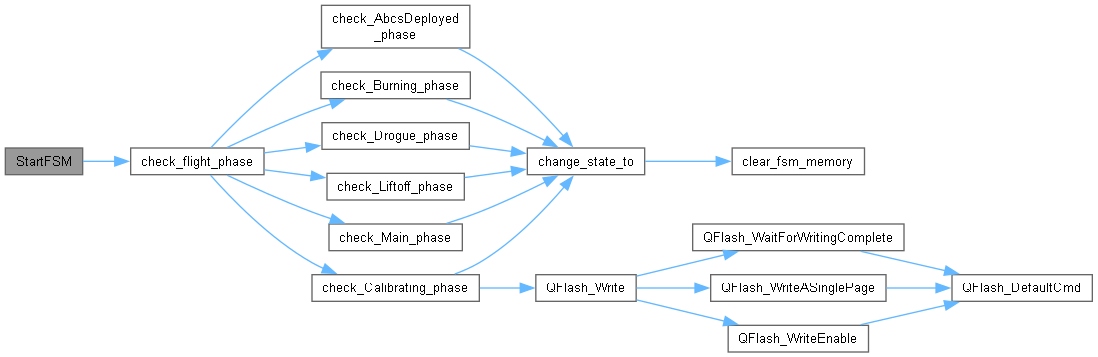
| void StartFSM | ( | void * | argument | ) |
Function implementing the FSM thread.
| argument | Not used |
| None |
Definition at line 1721 of file main.c.
References estimation_output_t::acceleration, acceleration_mg_1, linear_acceleration_t::accX, linear_acceleration_t::accY, linear_acceleration_t::accZ, altitude, check_flight_phase(), flight_state, FSM_FLAG, estimation_output_t::height, htim13, estimation_output_t::velocity, and velocity.
Referenced by main().
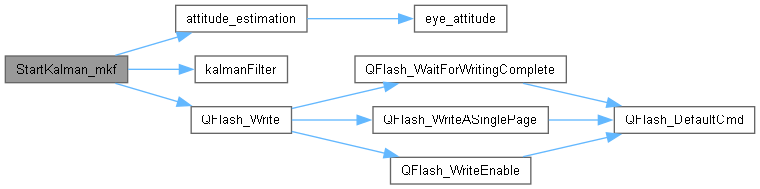
| void StartKalman_mkf | ( | void * | argument | ) |
Function implementing the Kalman_mkf thread.
| argument | Not used |
| None |
gnss_flag 0: no fix dal GNSS, 1:fix dal GNSS
Definition at line 1758 of file main.c.
References a_m, alpha, altitude, attitude_estimation(), cpy_buffer, data_buffer, flag_attitude, flag_flash, flag_kf, flash_address, gnss_flag, gps_vel, KALMAN_FLAG, kalmanFilter(), num_of_lin_acc_saved_flash, num_of_saved_rest_packages_flash, num_of_saved_rest_packages_locked, omega, P_2, q, Q, q_new, QFlash_Write(), R, Ts, velocity, x_est, and z.
Referenced by main().

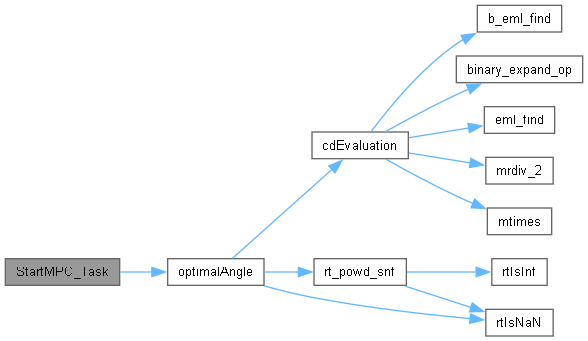
| void StartMPC_Task | ( | void * | argument | ) |
Function implementing the MPC_Task thread.
| argument | Not used |
| None |
Definition at line 1837 of file main.c.
References ABCSDEPLOYED, Data_Package_For_Marconi::acc_x, Data_Package_For_Marconi::acc_y, Data_Package_For_Marconi::acc_z, acceleration_mg_1, adcVal, alpha, Data_Package_For_Marconi::altitude, altitude, angular_rate_mdps_1, array, barometer_data_1, Data_Package_For_Marconi::Battery_Voltage, BURNING, CALIBRATING, cd_table, Data_Package_For_Marconi::deg, deployment_states, Data_Package_For_Marconi::dps_x, Data_Package_For_Marconi::dps_y, Data_Package_For_Marconi::dps_z, DROGUE, drogue, flag_MPC, flight_fsm_t::flight_state, flight_state, hadc3, htim7, huart1, INVALID, LIFTOFF, mach_states, Data_Package_For_Marconi::mag_x, Data_Package_For_Marconi::mag_y, Data_Package_For_Marconi::mag_z, MAIN, mainp, max_alt, max_vel, message, MPC_FLAG, optimalAngle(), Data_Package_For_Marconi::parachute_1, Data_Package_For_Marconi::parachute_2, Data_Package_For_Marconi::phase, bmp3_data::pressure, Data_Package_For_Marconi::pressure, sim_time_step, target_apogee, bmp3_data::temperature, Data_Package_For_Marconi::temperature, tolerance, TOUCHDOWN, Data_Package_For_Marconi::velocity, velocity, Vin, Vr, and x_est.
Referenced by main().

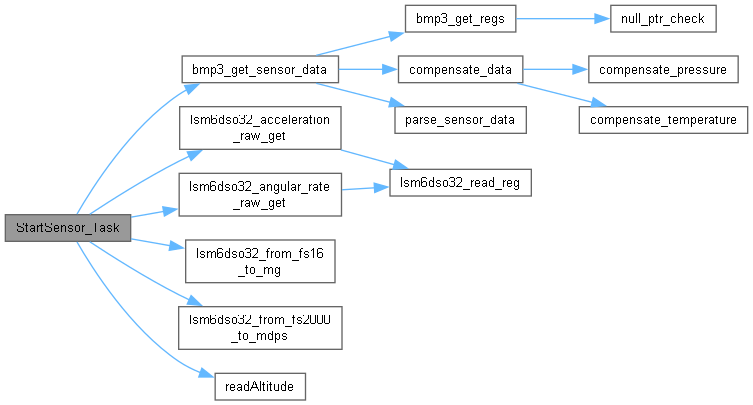
| void StartSensor_Task | ( | void * | argument | ) |
Function implementing the Sensor_Task thread.
| argument | Not used |
| None |
Definition at line 1588 of file main.c.
References a_m, ABCSDEPLOYED, acceleration_mg_1, Data_Package_no_Linear_IMU::altitude, altitude, angular_rate_mdps_1, barometer_data_1, bmp390_1, bmp3_get_sensor_data(), BMP3_PRESS_TEMP, BURNING, CALIBRATING, data_buffer, data_raw_acceleration_1, data_raw_angular_rate_1, Data_Package_no_Linear_IMU::dps_x, Data_Package_no_Linear_IMU::dps_y, Data_Package_no_Linear_IMU::dps_z, DROGUE, first_measure, flag_flash, flight_fsm_t::flight_state, flight_state, gps_vel, htim6, imu_1, INVALID, KALMAN_FLAG, Kalman_mkfHandle, LIFTOFF, lsm6dso32_acceleration_raw_get(), lsm6dso32_angular_rate_raw_get(), lsm6dso32_from_fs16_to_mg(), lsm6dso32_from_fs2000_to_mdps(), MAIN, num_of_lin_acc_saved, num_of_saved_rest_packages, num_of_saved_rest_packages_locked, omega, Data_Package_no_Linear_IMU::phase, bmp3_data::pressure, Data_Package_no_Linear_IMU::pressure, Pressure_1, readAltitude(), SENSOR_FLAG, bmp3_data::temperature, Data_Package_no_Linear_IMU::temperature, Temperature_1, TOUCHDOWN, Data_Package_no_Linear_IMU::velocity, velocity, and z.
Referenced by main().