|
Da Vinci Firmware 1
Firmware for the DaVinci-M rocket avionics board.
|
|
Da Vinci Firmware 1
Firmware for the DaVinci-M rocket avionics board.
|
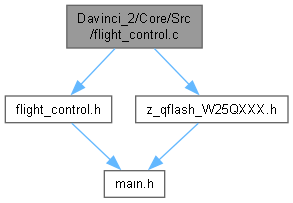
Go to the source code of this file.
Functions | |
| static void | clear_fsm_memory (flight_fsm_t *fsm_state) |
| void | check_flight_phase (flight_fsm_t *phase, estimation_output_t MotionData, linear_acceleration_t acc_data) |
| Main FSM router function that delegates to the current state's handler. | |
| void | check_Calibrating_phase (flight_fsm_t *fsm_state, estimation_output_t MotionData, linear_acceleration_t acc_data) |
| Handler for the CALIBRATING state. | |
| void | check_Liftoff_phase (flight_fsm_t *fsm_state, estimation_output_t MotionData) |
| Handler for the LIFTOFF state. | |
| void | check_Burning_phase (flight_fsm_t *phase, estimation_output_t MotionData) |
| Handler for the BURNING state (powered ascent). | |
| void | check_AbcsDeployed_phase (flight_fsm_t *phase, estimation_output_t MotionData) |
| Handler for the ABCSDEPLOYED state (apogee control). | |
| void | check_Drogue_phase (flight_fsm_t *phase, estimation_output_t MotionData) |
| Handler for the DROGUE state (descent under drogue parachute). | |
| void | check_Main_phase (flight_fsm_t *phase, estimation_output_t MotionData) |
| Handler for the MAIN state (descent under main parachute). | |
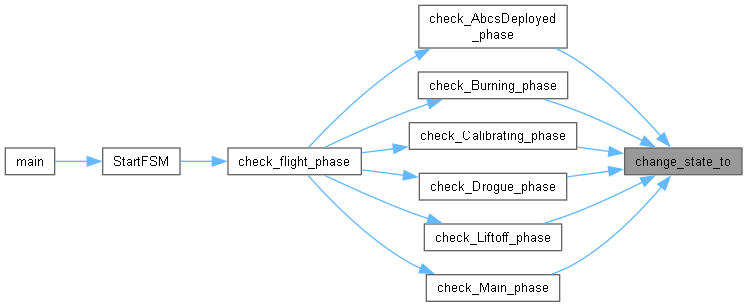
| void | change_state_to (flight_fsm_t *phase, flight_phase_t new_phase) |
| Handles the mechanics of a state transition. | |
Variables | |
| float_t | previous_altitude = 0 |
| void change_state_to | ( | flight_fsm_t * | fsm_state, |
| flight_phase_t | new_state | ||
| ) |
Handles the mechanics of a state transition.
This utility function updates the FSM's state to the new phase, sets the state_changed flag, and records the transition timestamp. It ensures state changes are handled consistently.
| [in,out] | fsm_state | Pointer to the FSM state object to be updated. |
| [in] | new_state | The new flight_phase_t to transition into. |
Definition at line 229 of file flight_control.c.
References clear_fsm_memory(), and flight_fsm_t::flight_state.
Referenced by check_AbcsDeployed_phase(), check_Burning_phase(), check_Calibrating_phase(), check_Drogue_phase(), check_Liftoff_phase(), and check_Main_phase().

| void check_AbcsDeployed_phase | ( | flight_fsm_t * | fsm_state, |
| estimation_output_t | MotionData | ||
| ) |
Handler for the ABCSDEPLOYED state (apogee control).
Monitors for apogee detection (velocity changing from positive to negative) to trigger drogue parachute deployment.
| [in,out] | fsm_state | Pointer to the FSM state object. |
| [in] | MotionData | Filtered estimation data (altitude, velocity). |
Definition at line 162 of file flight_control.c.
References ABCSDEPLOYED, APOGEE_SAFETY_COUNTER, change_state_to(), DROGUE, drogue, flag_attitude, flag_MPC, flight_fsm_t::flight_state, estimation_output_t::height, flight_fsm_t::memory, and previous_altitude.
Referenced by check_flight_phase().


| void check_Burning_phase | ( | flight_fsm_t * | fsm_state, |
| estimation_output_t | MotionData | ||
| ) |
Handler for the BURNING state (powered ascent).
Monitors for motor burnout and transitions to the coasting/apogee control phase.
| [in,out] | fsm_state | Pointer to the FSM state object. |
| [in] | MotionData | Filtered estimation data (altitude, velocity). |
Definition at line 126 of file flight_control.c.
References ABCSDEPLOYED, APOGEE_SAFETY_COUNTER, BURNING, change_state_to(), COASTING_SAFETY_COUNTER, DROGUE, drogue, flag_attitude, flag_MPC, flight_fsm_t::flight_state, estimation_output_t::height, flight_fsm_t::memory, flight_fsm_t::memory_bis, and previous_altitude.
Referenced by check_flight_phase().


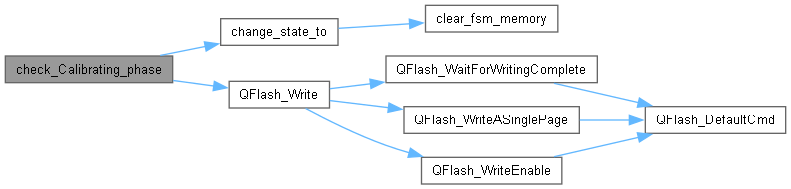
| void check_Calibrating_phase | ( | flight_fsm_t * | fsm_state, |
| estimation_output_t | MotionData, | ||
| linear_acceleration_t | acc_data | ||
| ) |
Handler for the CALIBRATING state.
Monitors for a sustained high vertical acceleration that indicates liftoff.
| [in,out] | fsm_state | Pointer to the FSM state object. |
| [in] | MotionData | Filtered estimation data (altitude, velocity). |
| [in] | acc_data | Raw linear acceleration data from the IMU. |
Definition at line 56 of file flight_control.c.
References linear_acceleration_t::accX, AIRBRAKES_SAFETY_COUNTER, CALIBRATING, change_state_to(), flag_attitude, flag_flash, flight_fsm_t::flight_state, estimation_output_t::height, LIFTOFF, LIFTOFF_SAFETY_COUNTER, LIFTOFF_TRESHOLD_ACC, flight_fsm_t::memory, flight_fsm_t::memory_bis, and QFlash_Write().
Referenced by check_flight_phase().

| void check_Drogue_phase | ( | flight_fsm_t * | fsm_state, |
| estimation_output_t | MotionData | ||
| ) |
Handler for the DROGUE state (descent under drogue parachute).
Monitors altitude to trigger main parachute deployment at a predefined height.
| [in,out] | fsm_state | Pointer to the FSM state object. |
| [in] | MotionData | Filtered estimation data (altitude, velocity). |
Definition at line 181 of file flight_control.c.
References change_state_to(), DROGUE, flight_fsm_t::flight_state, estimation_output_t::height, MAIN, MAIN_DEPLOY_HEIGHT, MAIN_SAFETY_COUNTER, mainp, and flight_fsm_t::memory.
Referenced by check_flight_phase().


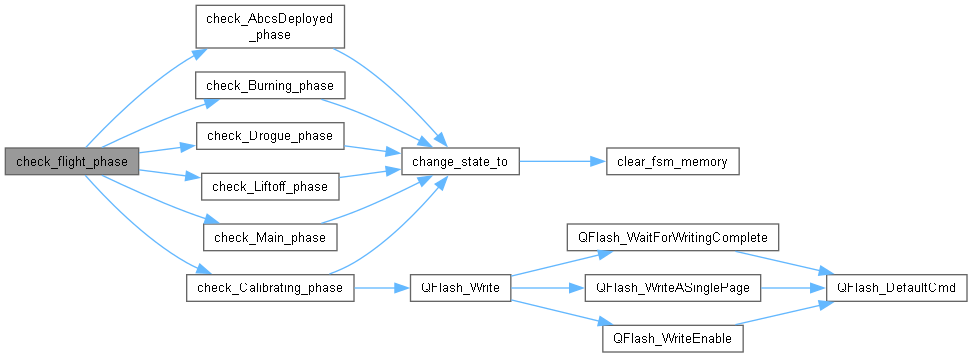
| void check_flight_phase | ( | flight_fsm_t * | fsm_state, |
| estimation_output_t | MotionData, | ||
| linear_acceleration_t | acc_data | ||
| ) |
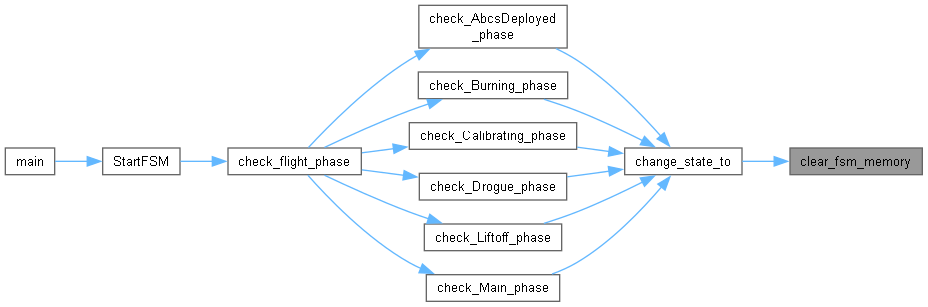
Main FSM router function that delegates to the current state's handler.
This function acts as a switchboard. Based on the flight_state member of the FSM object, it calls the appropriate handler function for the current phase (e.g., check_Calibrating_phase, check_Liftoff_phase, etc.).
| [in,out] | fsm_state | Pointer to the FSM state object. |
| [in] | MotionData | The latest output from the state estimation filter. |
| [in] | acc_data | The latest raw linear acceleration data. |
Definition at line 17 of file flight_control.c.
References ABCSDEPLOYED, BURNING, CALIBRATING, check_AbcsDeployed_phase(), check_Burning_phase(), check_Calibrating_phase(), check_Drogue_phase(), check_Liftoff_phase(), check_Main_phase(), DROGUE, flight_fsm_t::flight_state, INVALID, LIFTOFF, MAIN, flight_fsm_t::state_changed, and TOUCHDOWN.
Referenced by StartFSM().

| void check_Liftoff_phase | ( | flight_fsm_t * | fsm_state, |
| estimation_output_t | MotionData | ||
| ) |
Handler for the LIFTOFF state.
Monitors for the end of the motor burn phase based on acceleration drop.
| [in,out] | fsm_state | Pointer to the FSM state object. |
| [in] | MotionData | Filtered estimation data (altitude, velocity). |
Definition at line 93 of file flight_control.c.
References APOGEE_SAFETY_COUNTER, BURNING, change_state_to(), COASTING_SAFETY_COUNTER, DROGUE, drogue, flag_attitude, flag_kf, flag_MPC, flight_fsm_t::flight_state, estimation_output_t::height, LIFTOFF, flight_fsm_t::memory, flight_fsm_t::memory_bis, and previous_altitude.
Referenced by check_flight_phase().


| void check_Main_phase | ( | flight_fsm_t * | fsm_state, |
| estimation_output_t | MotionData | ||
| ) |
Handler for the MAIN state (descent under main parachute).
Monitors for a stable, low altitude and a spike in acceleration to detect landing.
| [in,out] | fsm_state | Pointer to the FSM state object. |
| [in] | MotionData | Filtered estimation data (altitude, velocity). |
Definition at line 197 of file flight_control.c.
References change_state_to(), flag_flash, flight_fsm_t::flight_state, MAIN, flight_fsm_t::memory, TOUCHDOWN, TOUCHDOWN_SAFETY_COUNTER, estimation_output_t::velocity, and VELOCITY_BOUND_TOUCHDOWN.
Referenced by check_flight_phase().


|
static |
Definition at line 222 of file flight_control.c.
References flight_fsm_t::clock_memory, and flight_fsm_t::memory.
Referenced by change_state_to().
| float_t previous_altitude = 0 |
Definition at line 13 of file flight_control.c.
Referenced by check_AbcsDeployed_phase(), check_Burning_phase(), and check_Liftoff_phase().