|
Da Vinci Firmware 1
Firmware for the DaVinci-M rocket avionics board.
|
|
Da Vinci Firmware 1
Firmware for the DaVinci-M rocket avionics board.
|
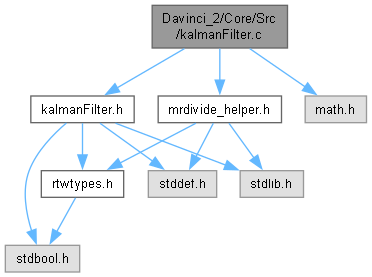
Go to the source code of this file.
Functions | |
| void | kalmanFilter (double x_est[2], double P[4], const double z[2], double alpha, double a_m, double Ts, const double Q[4], const double R[4], bool gnss_signal) |
| Executes one prediction and correction step of the Kalman filter. | |
| void kalmanFilter | ( | double | x_est[2], |
| double | P[4], | ||
| const double | z[2], | ||
| double | alpha, | ||
| double | a_m, | ||
| double | Ts, | ||
| const double | Q[4], | ||
| const double | R[4], | ||
| bool | gnss_signal | ||
| ) |
Executes one prediction and correction step of the Kalman filter.
| [in,out] | x_est | State Estimate Vector [2x1]. On input, the previous state; on output, the updated state.
|
| [in,out] | P | Estimate Covariance Matrix [2x2]. Represents the filter's uncertainty. Updated in place. Stored as a 4-element row-major array. |
| [in] | z | Measurement Vector [2x1]. Raw sensor readings.
|
| [in] | alpha | The rocket's tilt angle (angle from vertical) in radians. Used to project acceleration. |
| [in] | a_m | Measured longitudinal acceleration (along the rocket's body axis) in m/s^2. |
| [in] | Ts | The time step (delta time) since the last filter update in seconds (s). |
| [in] | Q | Process Noise Covariance Matrix [2x2]. Models the uncertainty of the physics prediction. Stored as a 4-element row-major array. |
| [in] | R | Measurement Noise Covariance Matrix [2x2]. Models the sensor noise. Stored as a 4-element row-major array. |
| [in] | gnss_signal | A boolean flag indicating if the GNSS velocity measurement in z[1] is valid (true) or not (false). |
Definition at line 49 of file kalmanFilter.c.
References a_m, alpha, Q, R, Ts, x_est, and z.
Referenced by StartKalman_mkf().
