|
Da Vinci Firmware 1
Firmware for the DaVinci-M rocket avionics board.
|
|
Da Vinci Firmware 1
Firmware for the DaVinci-M rocket avionics board.
|
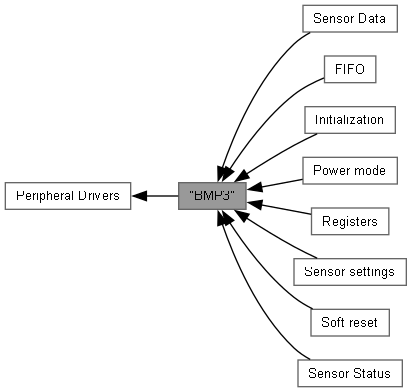
Modules | |
| Initialization | |
| Initialize the sensor and device structure. | |
| Soft reset | |
| Perform soft reset of the sensor. | |
| Sensor settings | |
| Get / Set sensor settings. | |
| Power mode | |
| Set / Get power mode of the sensor. | |
| Sensor Data | |
| Get Sensor data. | |
| Registers | |
| Read / Write data to the given register address. | |
| FIFO | |
| FIFO operations of the sensor. | |
| Sensor Status | |
| Read status of the sensor. | |
Data Structures | |
| struct | bmp3_reg_calib_data |
| Register Trim Variables. More... | |
| struct | bmp3_adv_settings |
| bmp3 advance settings More... | |
| struct | bmp3_odr_filter_settings |
| bmp3 odr and filter settings More... | |
| struct | bmp3_sens_status |
| bmp3 sensor status flags More... | |
| struct | bmp3_int_status |
| bmp3 interrupt status flags More... | |
| struct | bmp3_err_status |
| bmp3 error status flags More... | |
| struct | bmp3_status |
| bmp3 status flags More... | |
| struct | bmp3_int_ctrl_settings |
| bmp3 interrupt pin settings More... | |
| struct | bmp3_settings |
| bmp3 device settings More... | |
| struct | bmp3_fifo_data |
| bmp3 fifo frame More... | |
| struct | bmp3_fifo_settings |
| bmp3 fifo configuration More... | |
| struct | bmp3_quantized_calib_data |
| Quantized Trim Variables. More... | |
| struct | bmp3_calib_data |
| Calibration data. More... | |
| struct | bmp3_data |
| bmp3 sensor structure which comprises of temperature and pressure data. More... | |
| struct | bmp3_uncomp_data |
| bmp3 sensor structure which comprises of un-compensated temperature and pressure data. More... | |
| struct | bmp3_dev |
| bmp3 device structure More... | |
Functions | |
| int8_t | bmp390_P_write (uint8_t reg_addr, const uint8_t *buf, uint32_t len, void *intf_ptr) |
| SPI write function for the primary Barometer (bmp390). | |
| int8_t | bmp390_P_read (uint8_t reg_addr, uint8_t *buf, uint32_t len, void *intf_ptr) |
| SPI read function for the primary Barometer (bmp390). | |
| int8_t | bmp390_B_write (uint8_t reg_addr, const uint8_t *buf, uint32_t len, void *intf_ptr) |
| SPI write function for the backup Barometer (bmp390). | |
| int8_t | bmp390_B_read (uint8_t reg_addr, uint8_t *buf, uint32_t len, void *intf_ptr) |
| SPI read function for the backup Barometer (bmp390). | |
| int8_t | init_bmp390_p (struct bmp3_dev *bmp390) |
| Initializes the primary barometer (BMP390). | |
| int8_t | init_bmp390_B (struct bmp3_dev *bmp390) |
| Initializes the backup barometer (BMP390). | |
| [in] | dev | : Structure instance of bmp3_dev. |
| 0 | -> Success |
| >0 | -> Warning |
| <0 | -> Error / int8_t bmp3_fifo_flush(struct bmp3_dev *dev); |
/**
| int8_t bmp390_B_read | ( | uint8_t | reg_addr, |
| uint8_t * | buf, | ||
| uint32_t | len, | ||
| void * | intf_ptr | ||
| ) |
SPI read function for the backup Barometer (bmp390).
This function is designed to be passed as a function pointer to the STMicroelectronics barometer driver library. It handles SPI bus transactions.
| [in] | reg_addr | The 7-bit register address to read from. The read bit is set automatically. |
| [out] | buf | Pointer to the buffer where read data will be stored. |
| [in] | len | The number of bytes to read. |
Definition at line 623 of file utilities.c.
References HAL_ERROR, HAL_OK, and hspi3.
Referenced by bmp3_B_spi_init().

| int8_t bmp390_B_write | ( | uint8_t | reg_addr, |
| const uint8_t * | buf, | ||
| uint32_t | len, | ||
| void * | intf_ptr | ||
| ) |
SPI write function for the backup Barometer (bmp390).
This function is designed to be passed as a function pointer to the STMicroelectronics barometer driver library. It handles SPI bus transactions.
| [in] | reg_addr | The 7-bit register address to write to. |
| [in] | buf | Pointer to the data buffer to be written. |
| [in] | len | The number of bytes to write. |
Definition at line 603 of file utilities.c.
References HAL_ERROR, HAL_OK, and hspi3.
Referenced by bmp3_B_spi_init().

| int8_t bmp390_P_read | ( | uint8_t | reg_addr, |
| uint8_t * | buf, | ||
| uint32_t | len, | ||
| void * | intf_ptr | ||
| ) |
SPI read function for the primary Barometer (bmp390).
This function is designed to be passed as a function pointer to the STMicroelectronics barometer driver library. It handles SPI bus transactions.
| [in] | reg_addr | The 7-bit register address to read from. The read bit is set automatically. |
| [out] | buf | Pointer to the buffer where read data will be stored. |
| [in] | len | The number of bytes to read. |
Definition at line 122 of file utilities.c.
References HAL_ERROR, HAL_OK, and hspi2.
Referenced by bmp3_P_spi_init().

| int8_t bmp390_P_write | ( | uint8_t | reg_addr, |
| const uint8_t * | buf, | ||
| uint32_t | len, | ||
| void * | intf_ptr | ||
| ) |
SPI write function for the primary Barometer (bmp390).
This function is designed to be passed as a function pointer to the STMicroelectronics barometer driver library. It handles SPI bus transactions.
| [in] | reg_addr | The 7-bit register address to write to. |
| [in] | buf | Pointer to the data buffer to be written. |
| [in] | len | The number of bytes to write. |
Definition at line 103 of file utilities.c.
References HAL_ERROR, HAL_OK, and hspi2.
Referenced by bmp3_P_spi_init().

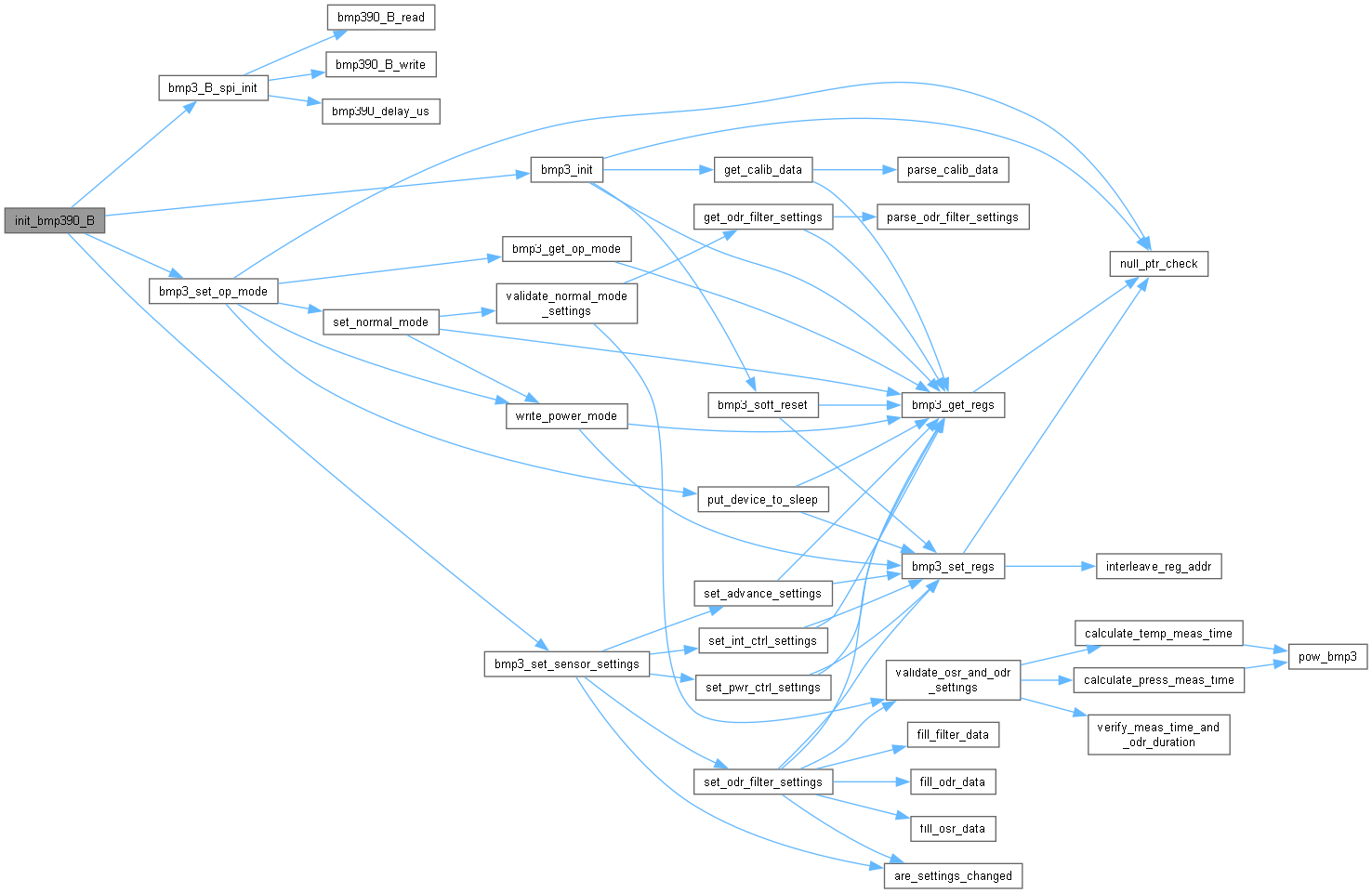
| int8_t init_bmp390_B | ( | struct bmp3_dev * | bmp390 | ) |
Initializes the backup barometer (BMP390).
Configures the barometer for normal operation with specified oversampling and data rate settings.
| [in,out] | bmp390 | Pointer to the bmp3_dev driver context structure. |
Definition at line 723 of file utilities.c.
References bmp3_B_spi_init(), BMP3_DISABLE, BMP3_ENABLE, BMP3_IIR_FILTER_DISABLE, bmp3_init(), BMP3_MODE_NORMAL, BMP3_NO_OVERSAMPLING, BMP3_ODR_200_HZ, BMP3_OK, BMP3_SEL_IIR_FILTER, BMP3_SEL_ODR, BMP3_SEL_PRESS_EN, BMP3_SEL_PRESS_OS, BMP3_SEL_TEMP_EN, BMP3_SEL_TEMP_OS, bmp3_set_op_mode(), bmp3_set_sensor_settings(), bmp3_int_ctrl_settings::drdy_en, HAL_ERROR, HAL_OK, bmp3_odr_filter_settings::iir_filter, bmp3_settings::int_settings, bmp3_odr_filter_settings::odr, bmp3_settings::odr_filter, bmp3_settings::op_mode, bmp3_settings::press_en, bmp3_odr_filter_settings::press_os, bmp3_settings::temp_en, and bmp3_odr_filter_settings::temp_os.
Referenced by main().

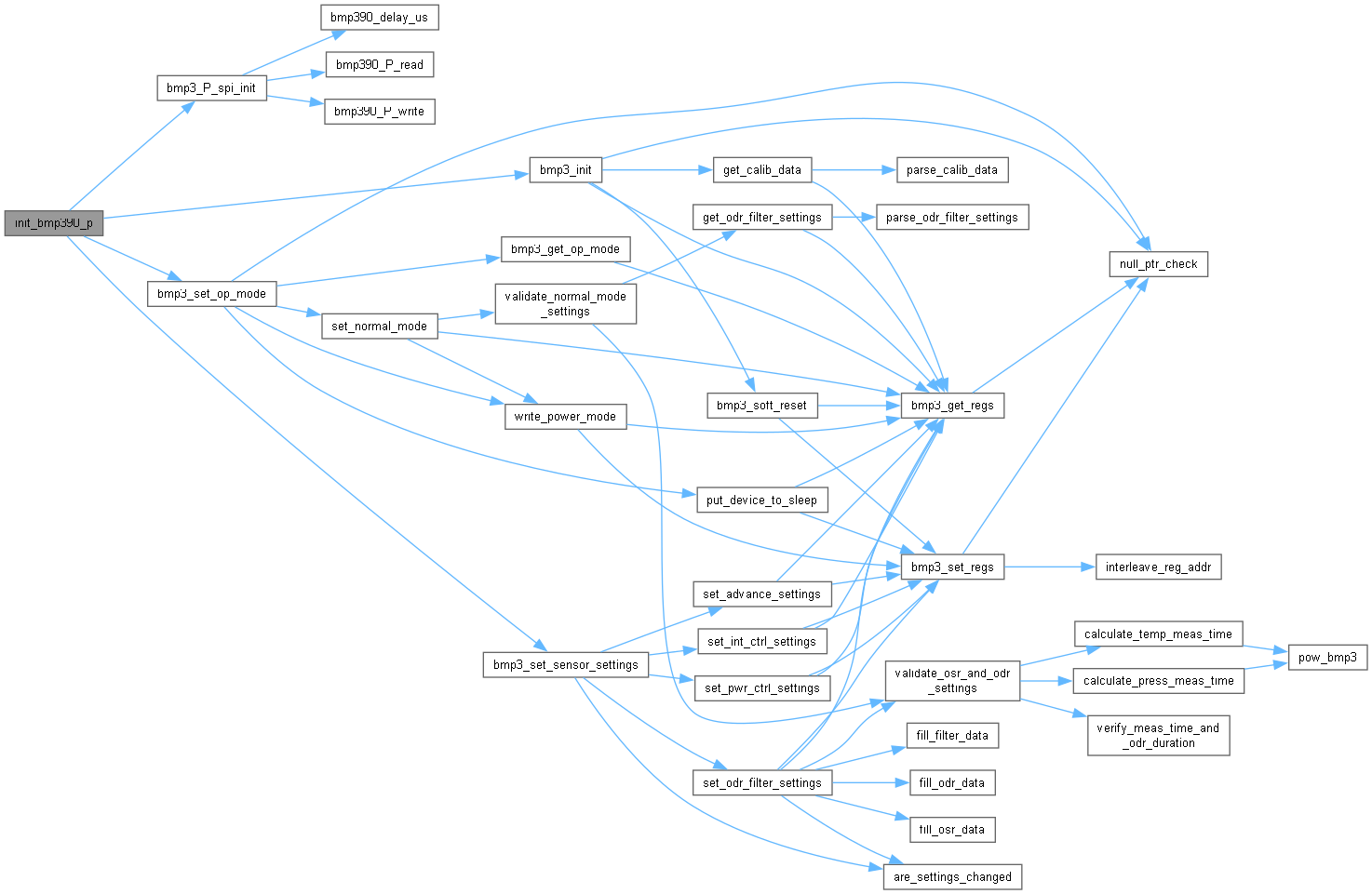
| int8_t init_bmp390_p | ( | struct bmp3_dev * | bmp390 | ) |
Initializes the primary barometer (BMP390).
Configures the barometer for normal operation with specified oversampling and data rate settings.
| [in,out] | bmp390 | Pointer to the bmp3_dev driver context structure. |
Definition at line 252 of file utilities.c.
References BMP3_DISABLE, BMP3_ENABLE, BMP3_IIR_FILTER_DISABLE, bmp3_init(), BMP3_MODE_NORMAL, BMP3_NO_OVERSAMPLING, BMP3_ODR_200_HZ, BMP3_OK, bmp3_P_spi_init(), BMP3_SEL_IIR_FILTER, BMP3_SEL_ODR, BMP3_SEL_PRESS_EN, BMP3_SEL_PRESS_OS, BMP3_SEL_TEMP_EN, BMP3_SEL_TEMP_OS, bmp3_set_op_mode(), bmp3_set_sensor_settings(), bmp3_int_ctrl_settings::drdy_en, HAL_ERROR, HAL_OK, bmp3_odr_filter_settings::iir_filter, bmp3_settings::int_settings, bmp3_odr_filter_settings::odr, bmp3_settings::odr_filter, bmp3_settings::op_mode, bmp3_settings::press_en, bmp3_odr_filter_settings::press_os, bmp3_settings::temp_en, and bmp3_odr_filter_settings::temp_os.
Referenced by main().