|
Da Vinci Firmware 1
Firmware for the DaVinci-M rocket avionics board.
|
|
Da Vinci Firmware 1
Firmware for the DaVinci-M rocket avionics board.
|
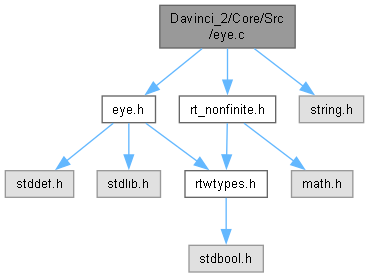
Go to the source code of this file.
Functions | |
| void | b_eye (double b_I[36]) |
| Creates a 6x6 identity matrix. | |
| void | eye (double b_I[9]) |
| Creates a 3x3 identity matrix. | |
| void | eye_attitude (double b_I[16]) |
| Creates a 4x4 identity matrix, typically for attitude calculations. | |
| void | eye_2 (double b_I[4]) |
| Creates a 2x2 identity matrix. | |
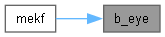
| void b_eye | ( | double | b_I[36] | ) |
Creates a 6x6 identity matrix.
| [out] | b_I | Pointer to a 36-element array where the 6x6 identity matrix will be stored. |
Definition at line 21 of file eye.c.
Referenced by mekf().
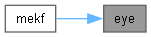
| void eye | ( | double | b_I[9] | ) |
Creates a 3x3 identity matrix.
| [out] | b_I | Pointer to a 9-element array where the 3x3 identity matrix will be stored. |
Definition at line 34 of file eye.c.
Referenced by mekf().
| void eye_2 | ( | double | b_I[4] | ) |
| void eye_attitude | ( | double | b_I[16] | ) |
Creates a 4x4 identity matrix, typically for attitude calculations.
| [out] | b_I | Pointer to a 16-element array where the 4x4 identity matrix will be stored. |
Definition at line 46 of file eye.c.
Referenced by attitude_estimation().
